 咨询客服
咨询客服

Mapillary Image Matching API(用于将用户照片与已有街景图像匹配,识别位置与方向)
2025年10月16日 09:07
GISBox是一站式三维GIS数据编辑、转换、发布平台,支持OSGB/GEOTIFF/RVT等多种GIS格式编辑,转换为3DTiles/Terrain等并发布。
简介
Mapillary Image Matching API是一种基于图像匹配技术的接口服务,主要用于通过计算机视觉算法实现多张图像之间的空间对齐和特征关联。该API通过检测关键点(如SIFT、ORB等特征)并计算单应性矩阵(Homography Matrix),将不同视角或时间拍摄的图像进行几何变换对齐。
文件结构
Mapillary Image Matching API的文件结构主要包含以下核心组件:
- API请求模块:处理HTTP请求与响应,包括认证(OAuth 2.0)、参数校验和错误处理,支持RESTful接口调用。
- 图像处理核心库:集成OpenSfM算法库,负责特征提取(SIFT/SuperPoint)、匹配(HNSW)和三维重建(SfM管道)。
- 元数据管理单元:存储和检索图像的经纬度、时间戳、设备信息等元数据,与Mapillary数据库交互。
- 开发者工具包:提供Python SDK和示例代码,简化上传、匹配和数据分析流程。
- 文档与测试套件:包含自动生成的API文档及单元测试模块,确保接口一致性。
优点
- 技术成熟性:Mapillary的图像匹配技术基于结构光(SfM)和深度学习算法,能够处理不同角度、光照条件下的图像匹配,适用于大规模街景数据集。
- 多平台支持:API支持通过Python SDK(如mapillary_tools)和RESTful接口调用,开发者可灵活集成到现有工作流中。此外,Mapillary提供QGIS和JOSM插件,便于地理信息分析和地图数据关联。
- 高精度匹配:结合SIFT、ORB等传统算法和深度学习模型,匹配准确率较高,尤其在街景图像的地理位置对齐中表现稳定。
缺点
- 处理速度限制:对于大规模图像数据集,匹配过程可能较慢,尤其是使用传统算法(如SIFT)时,需依赖高性能计算资源。
- 数据量限制:免费版API可能存在调用频率或数据量的限制,企业级应用需购买商业授权以解除限制。
- 学习曲线较陡:开发者需熟悉SfM原理和Mapillary工具链(如mapillary_tools),对新手不够友好。
应用场景
Mapillary Image Matching API主要用于街景图像的处理和分析,其应用场景包括地理信息系统(GIS)中的地图更新和地理信息分析,城市规划中的基础设施和交通状况评估,以及交通管理的实时流量监控。此外,该API还为自动驾驶车辆提供高精度的街景数据支持,帮助车辆更好地理解周围环境。开发者还可以通过QGIS等平台集成Mapillary图像进行地理信息分析,或利用API进行物体检测和图像匹配任务。
示例图
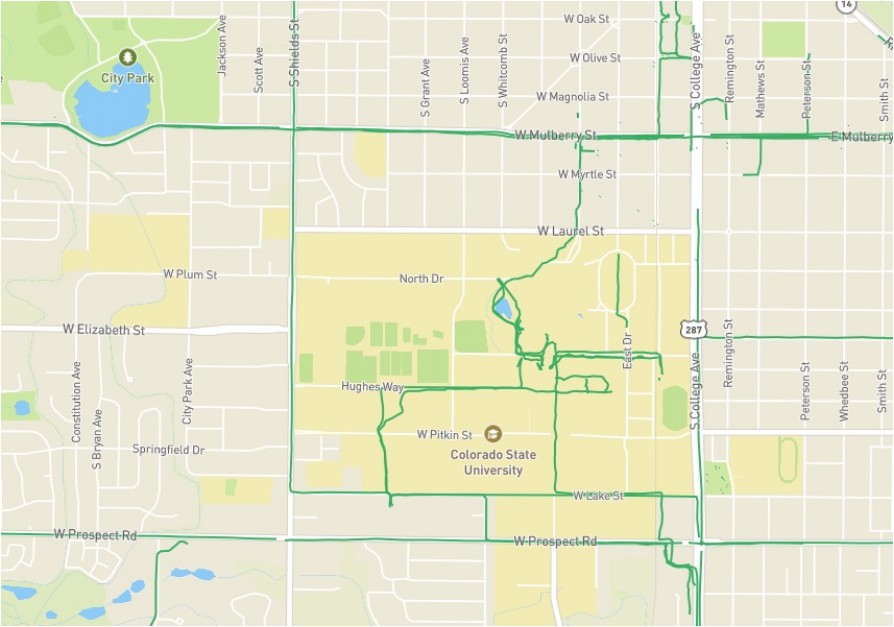
1. 穿过科罗拉多州立大学校园的绿线为一系列Mapillary照片组成的线串。
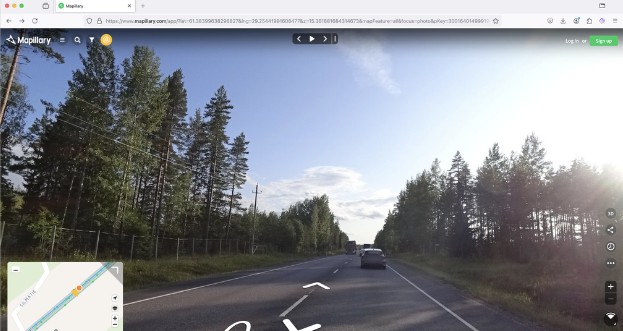
2. 观察Mapillary检测到的特征的位置。
文件打开方式
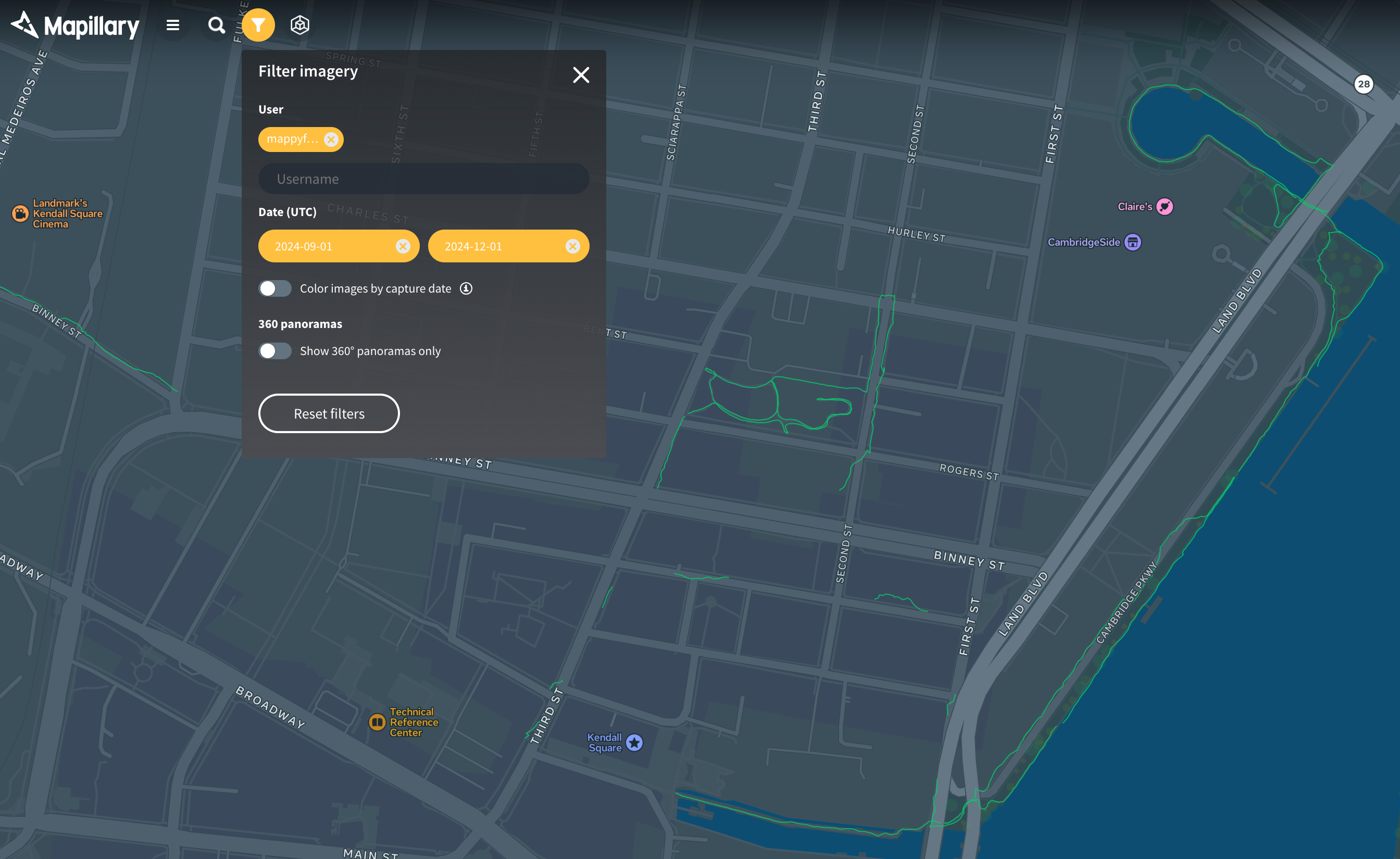
1. 在Mapillary上过滤图像。
相关 GIS 服务
参考资料
- https://blog.mapillary.com/product/2017/04/12/how-to-retrieve-mapillary-images-to-use-in-external-tools.html
- https://gis.stackexchange.com/questions/486735/retrieve-all-mapillary-images-which-show-a-feature-with-a-particular-id
- https://help.mapillary.com/hc/en-us/articles/115001662325-Viewing-imagery-on-the-Mapillary-web-app-the-complete-guide